Deformable Origami Structure:
Using Pneumatic Actuation P1
Term
Course
Instructor
Partner
Program
Course
Instructor
Partner
Program
Fall Harvard GSD
GSD 6478 Informal Robotics
Chuck Hoberman
Andrei Petrus, Jackson Wilt, Edith Xu
Grasshopper, Python
GSD 6478 Informal Robotics
Chuck Hoberman
Andrei Petrus, Jackson Wilt, Edith Xu
Grasshopper, Python
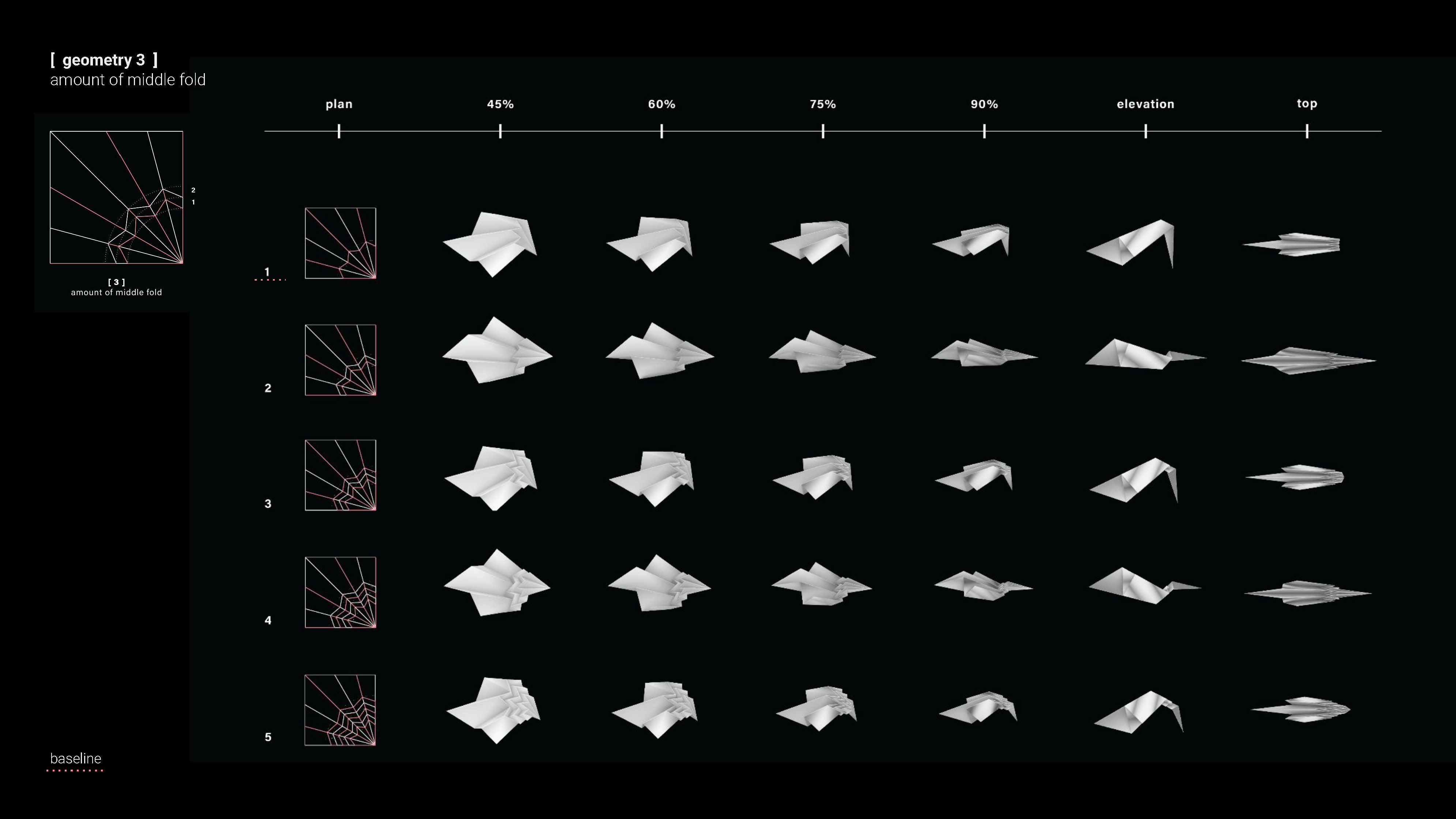
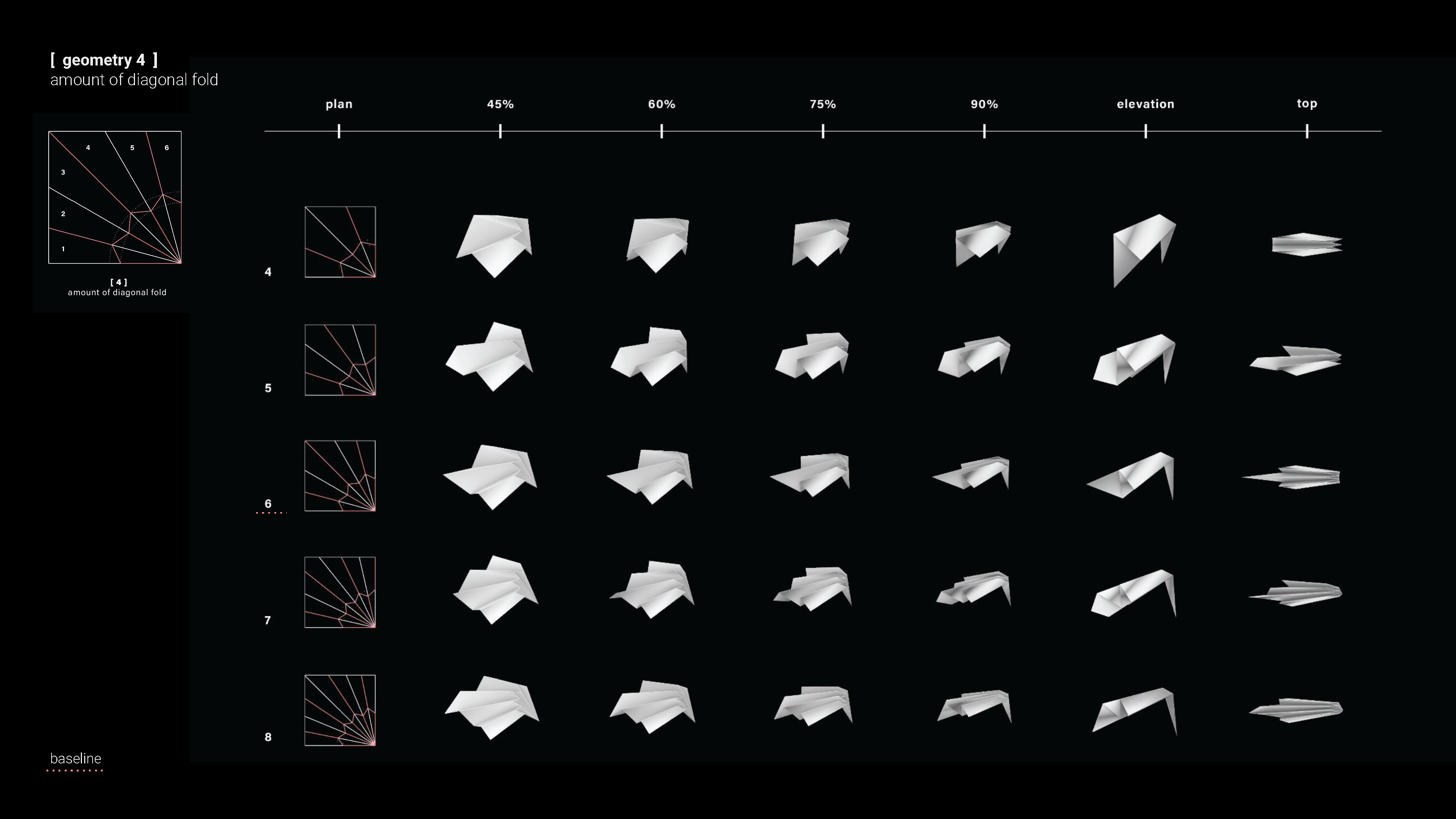
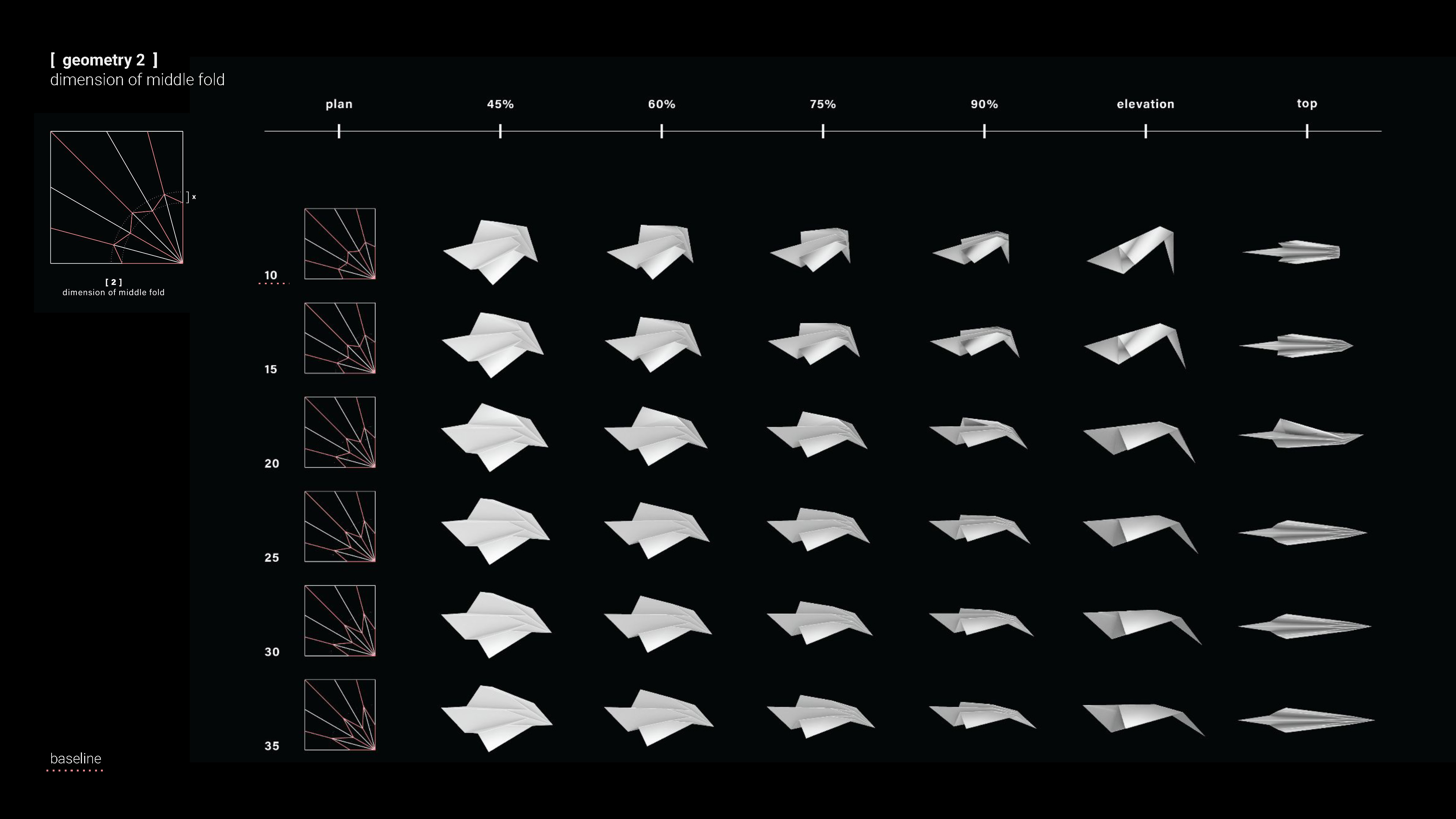
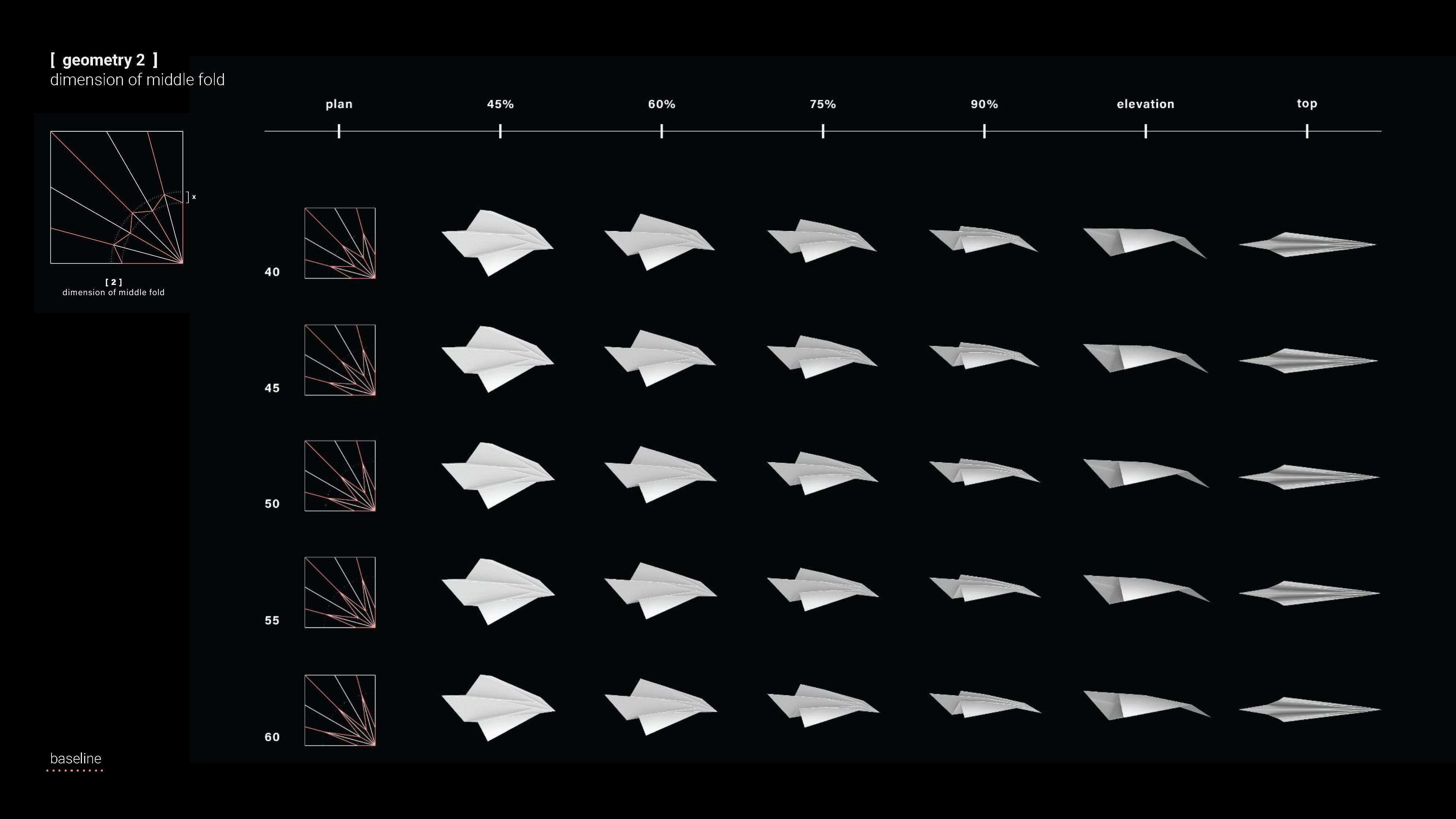
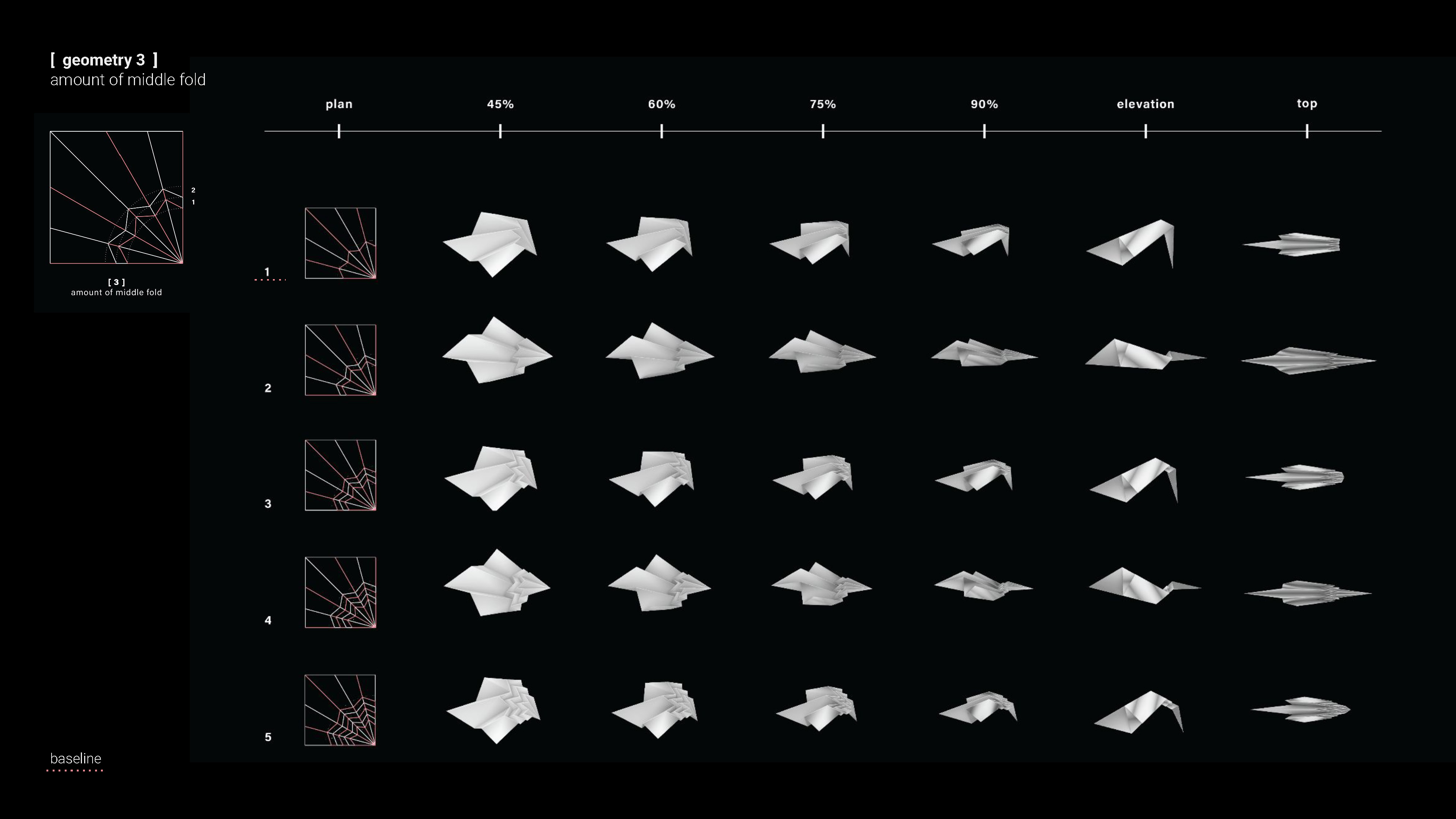
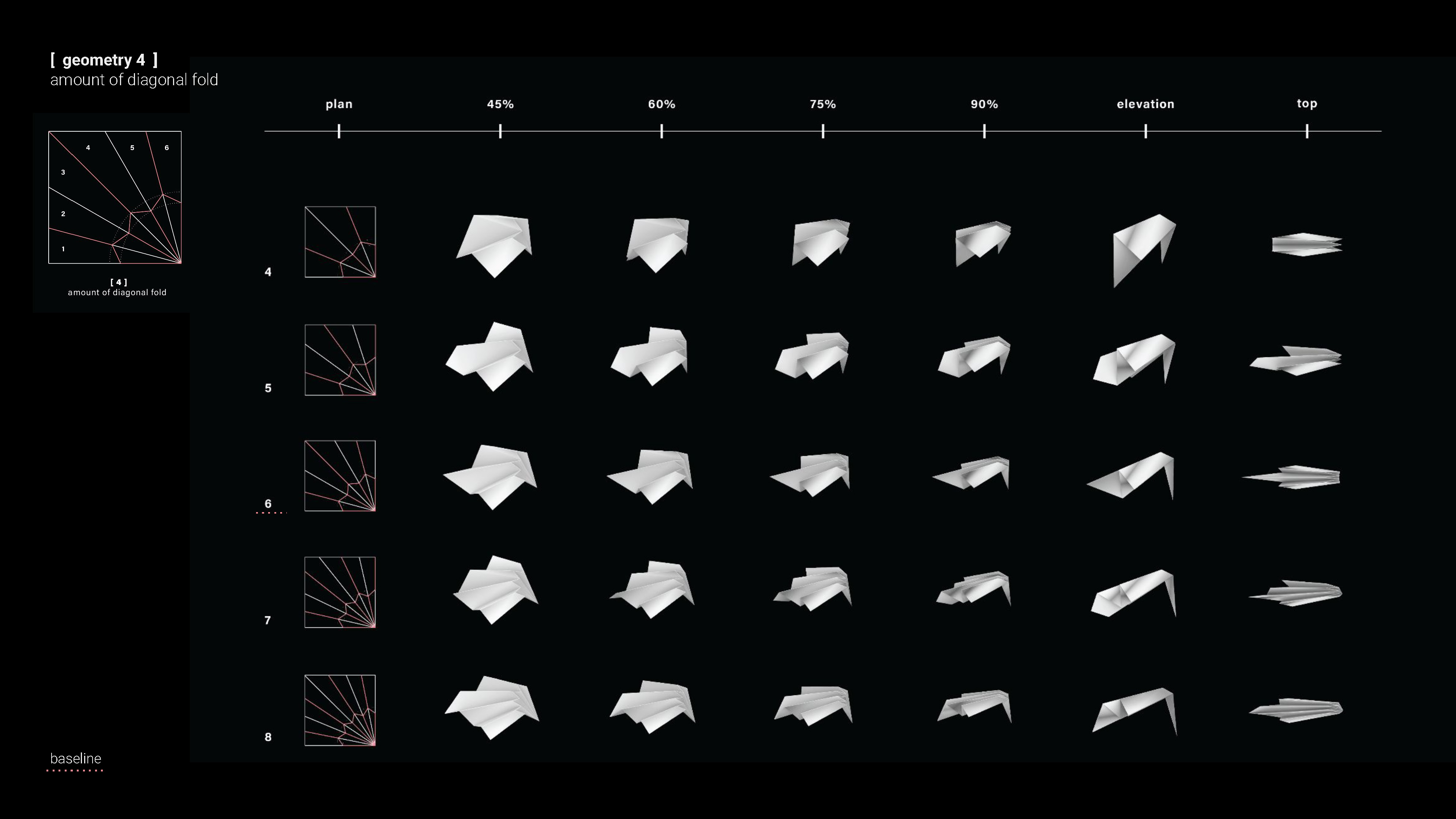
The goal of this project is to design and develop a deformable origami structure that can be controlled using pneumatic actuation. The structure will be created using traditional origami folding techniques and will be optimized using the Grasshopper software. By using pneumatic actuation, the structure will be able to change its shape and size in response to external stimuli.
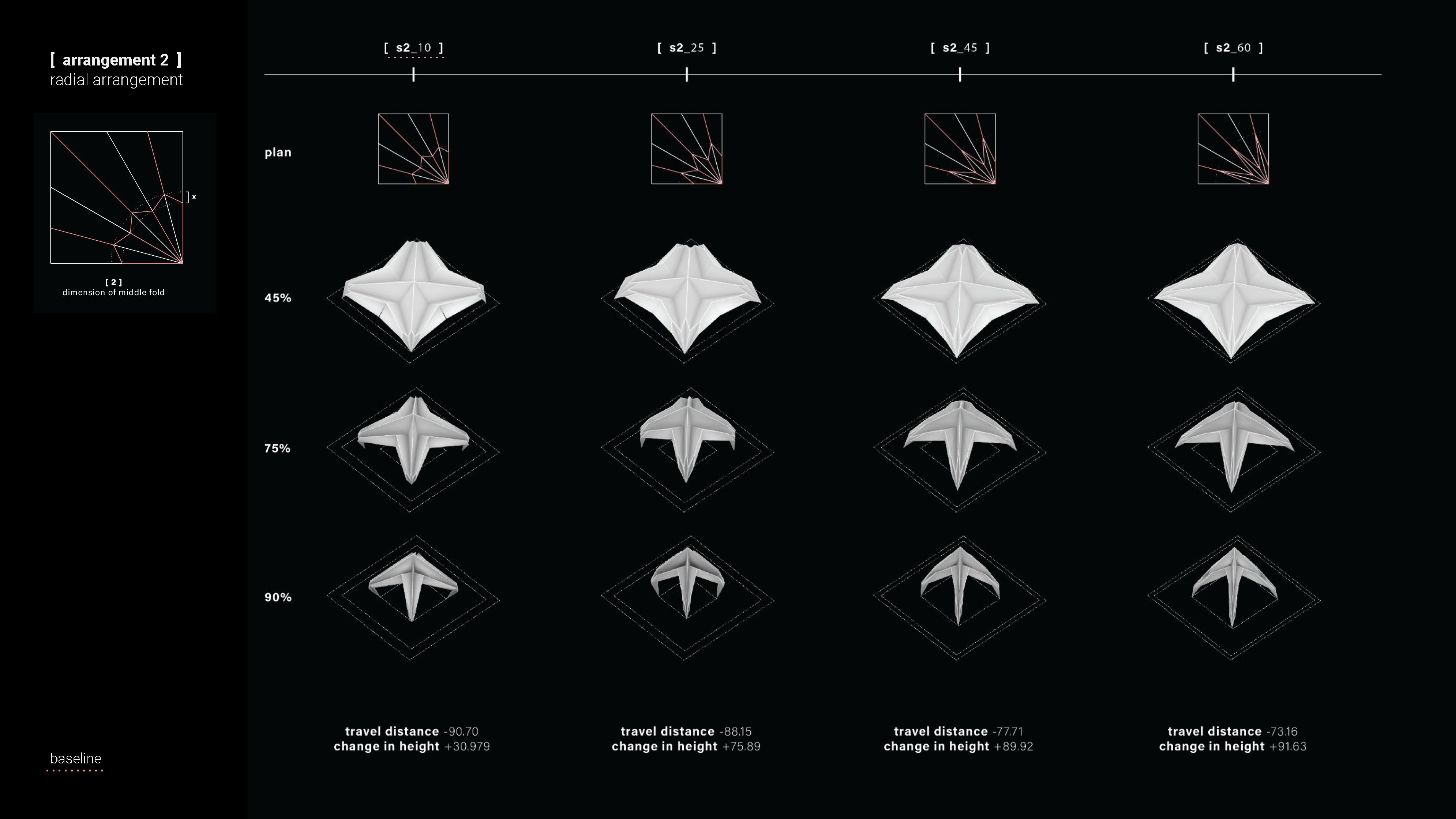
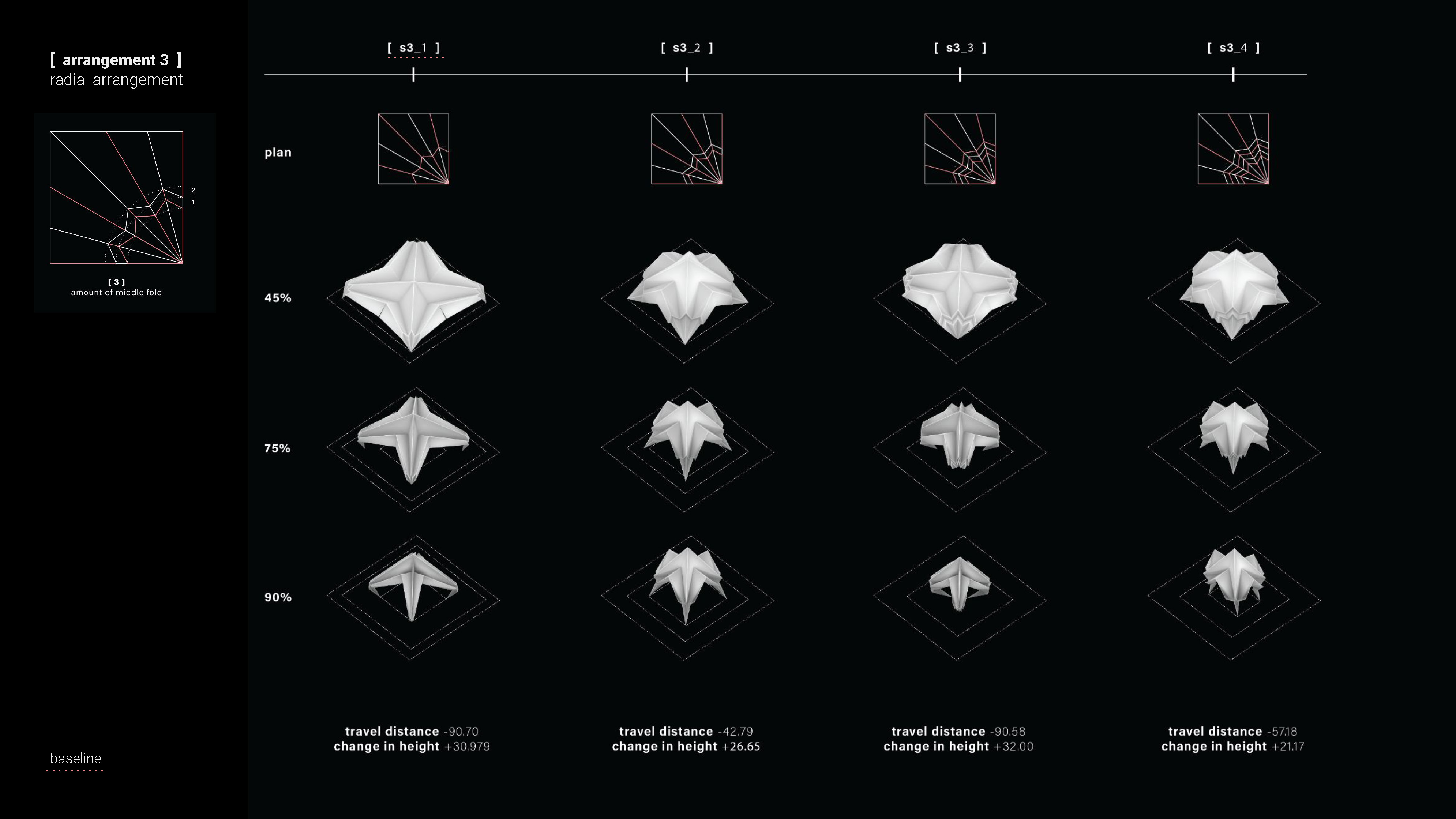
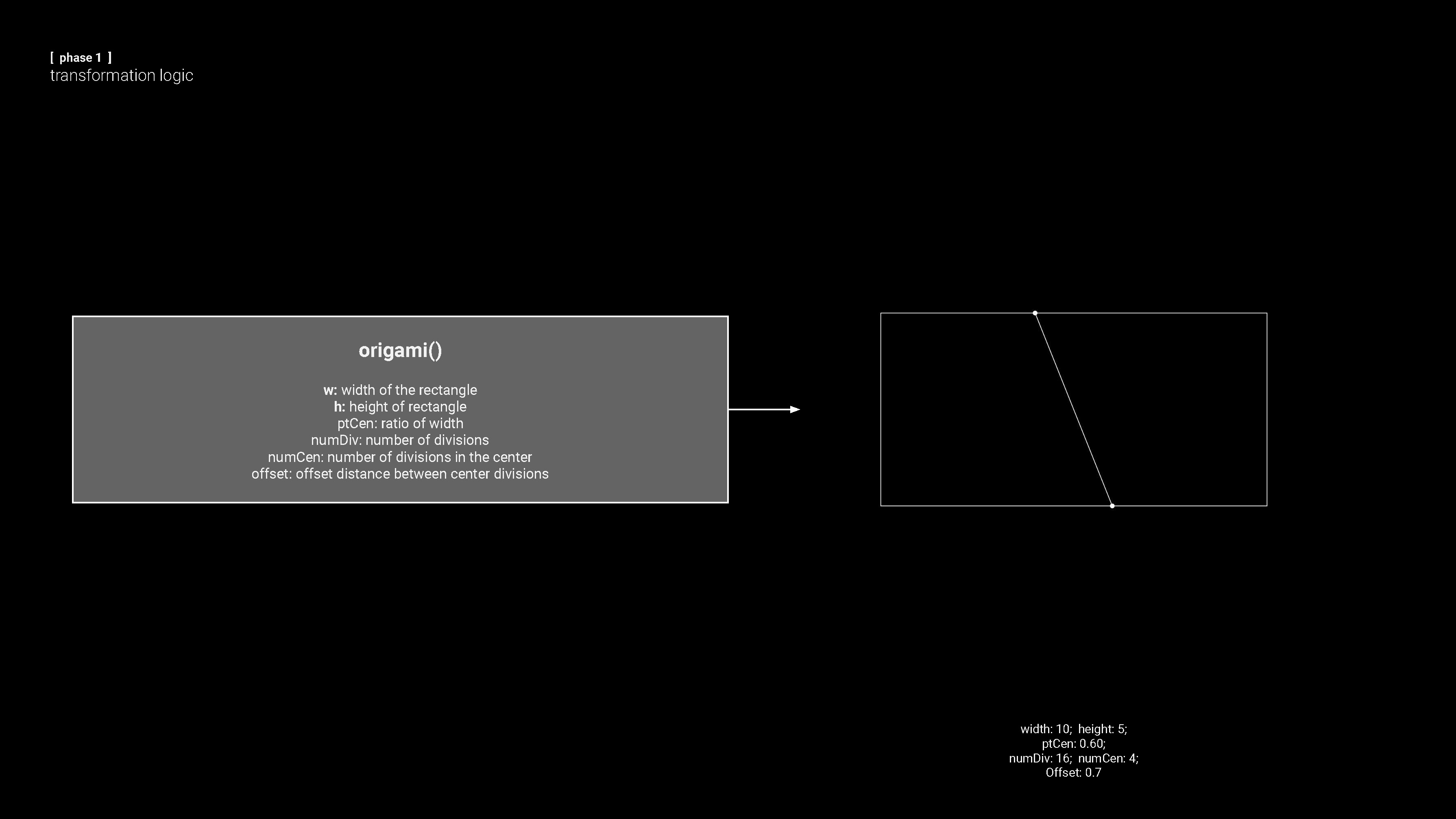
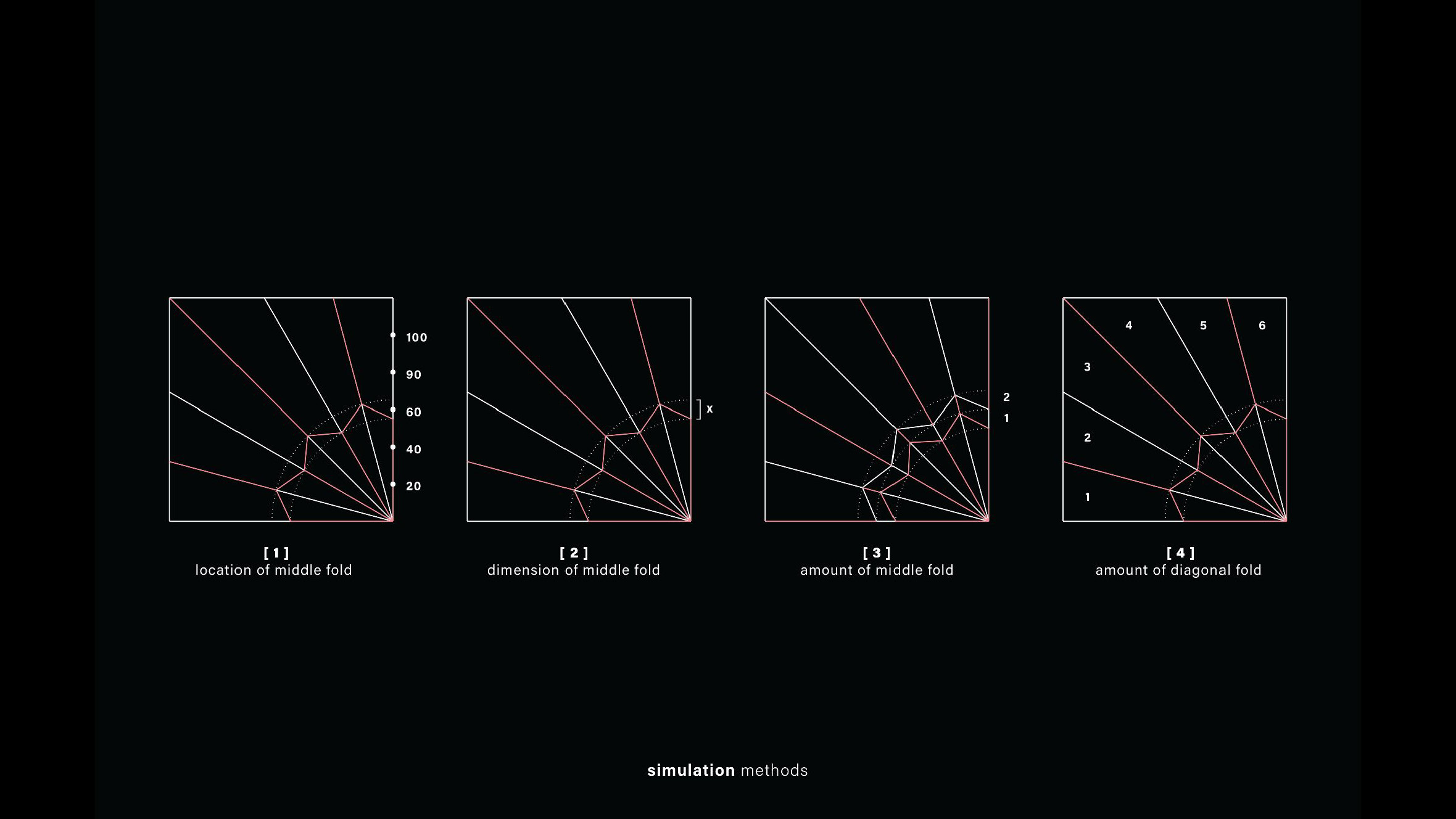
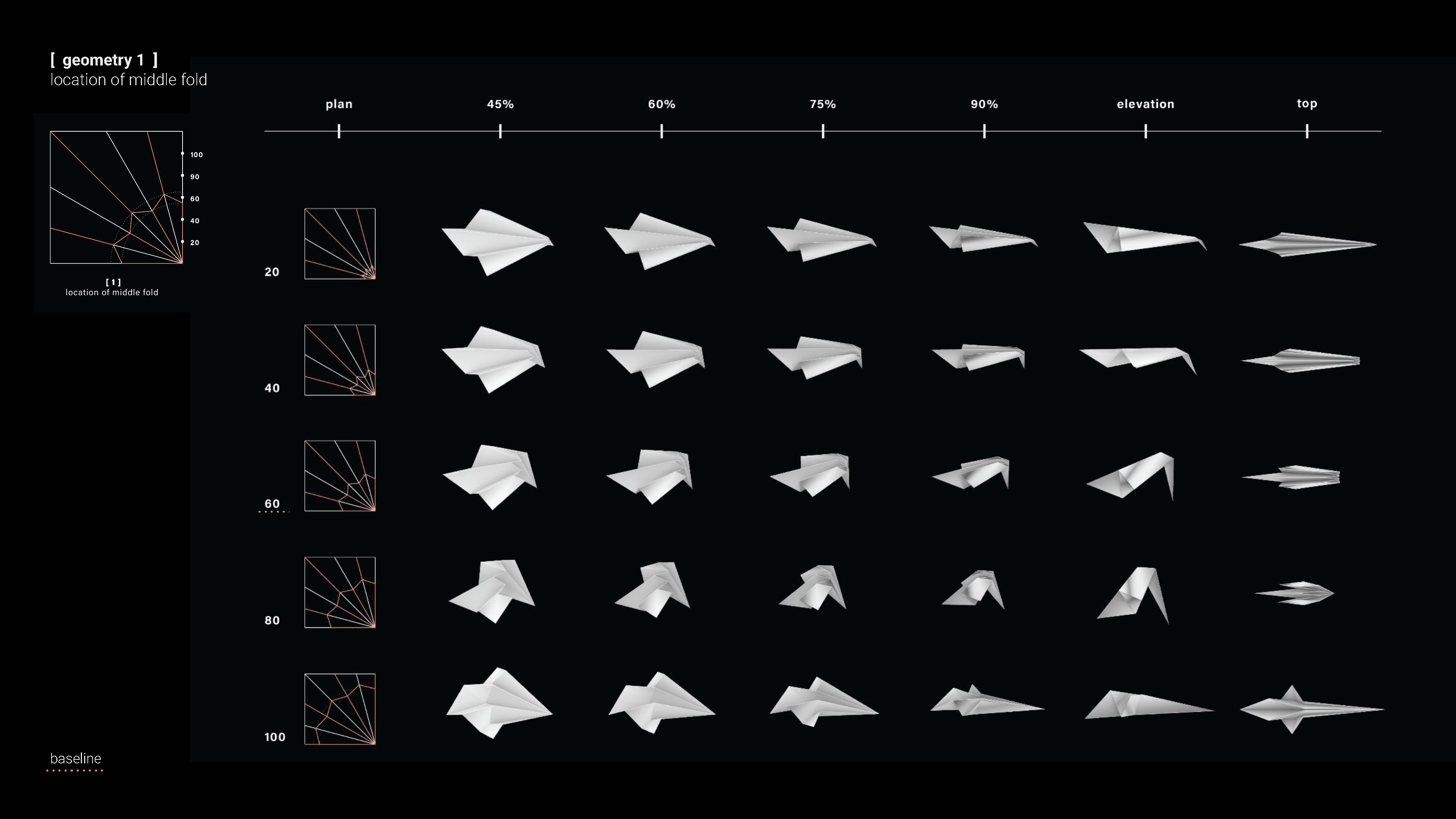
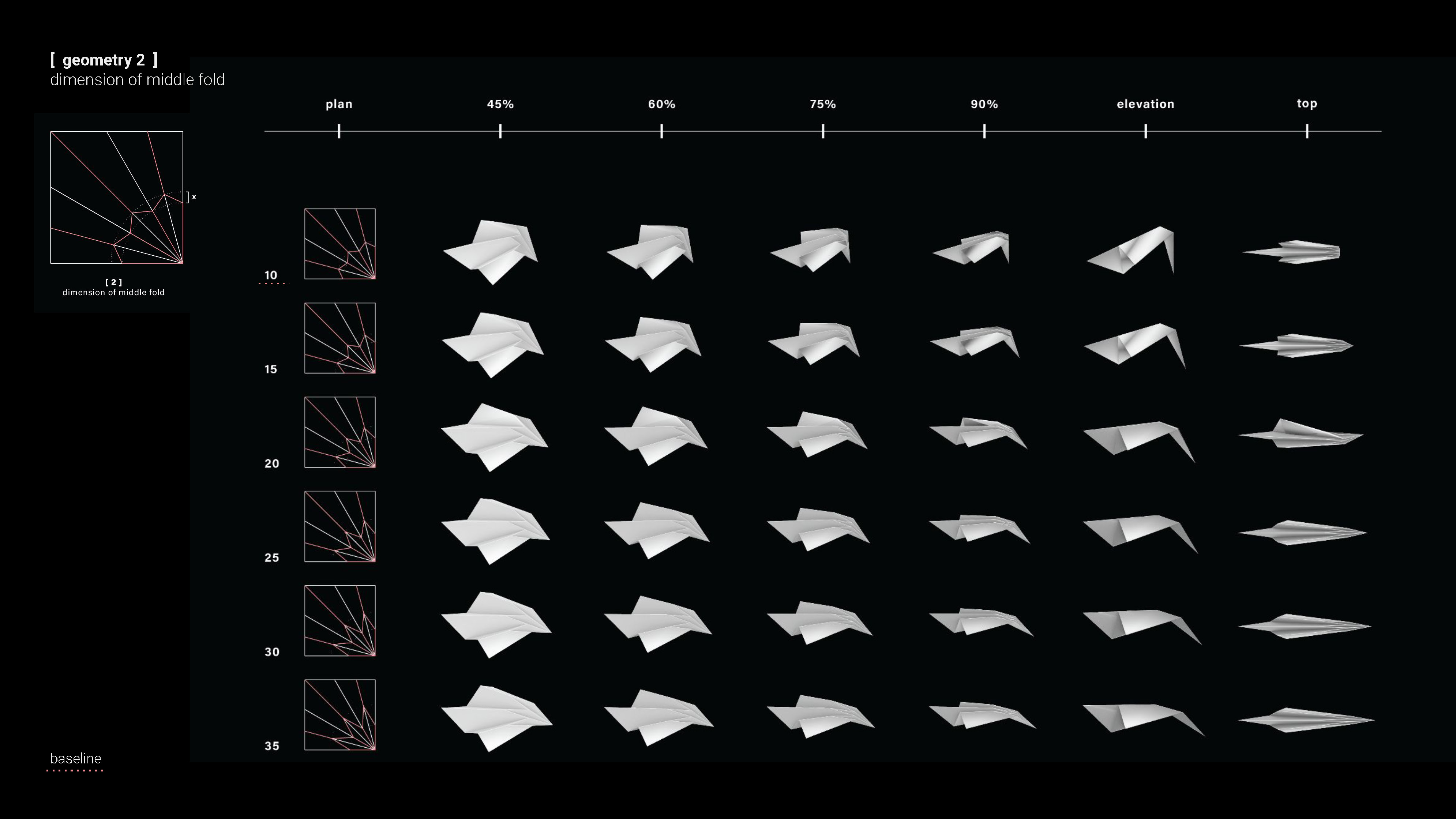
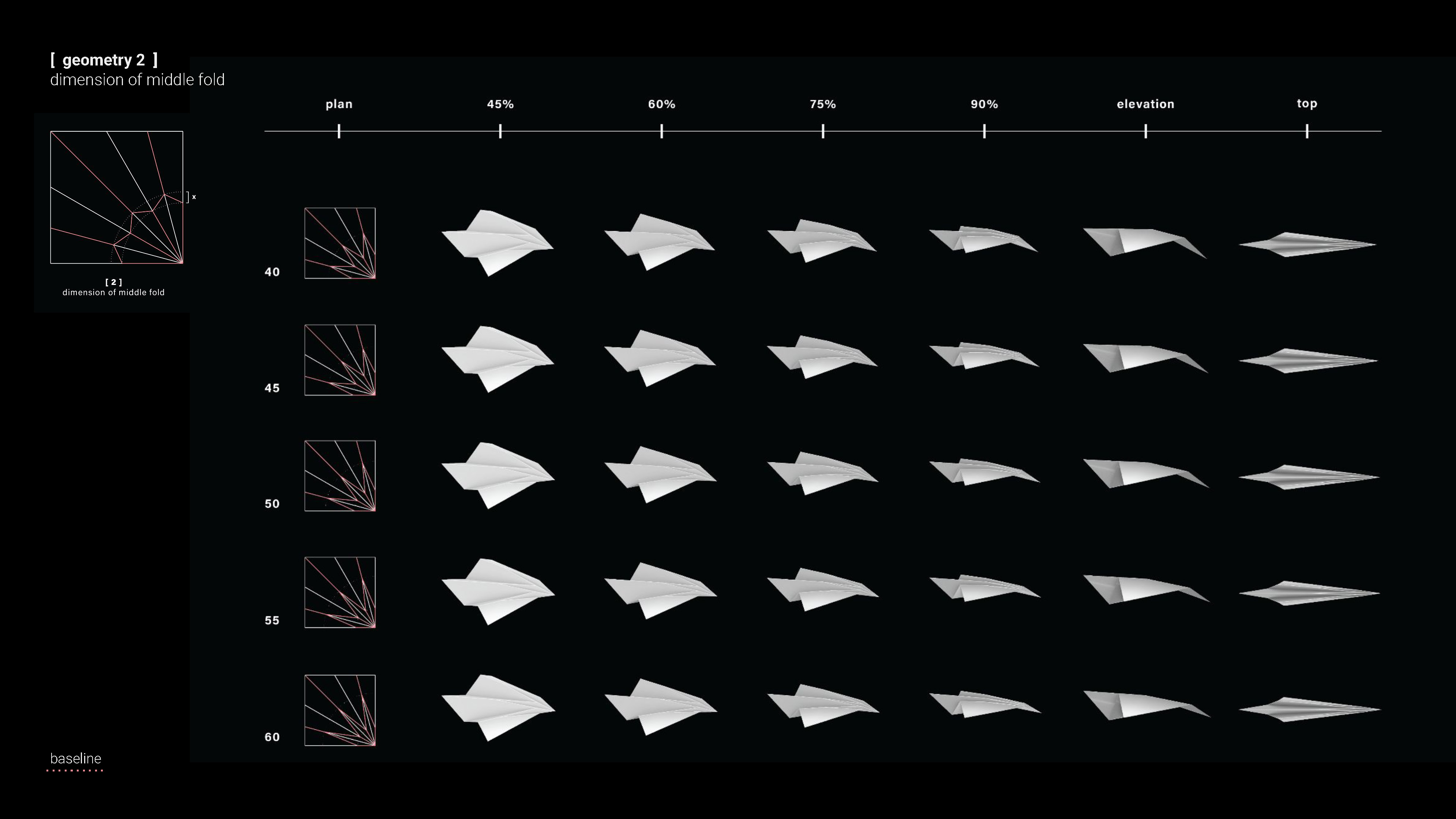
The project will involve several stages. First, the origami fold lines will be designed and optimized using Grasshopper. The software will be used to simulate different folding patterns and determine the optimal design for the structure. Once the design is finalized, it will be transferred onto a physical model.
Grasshopper













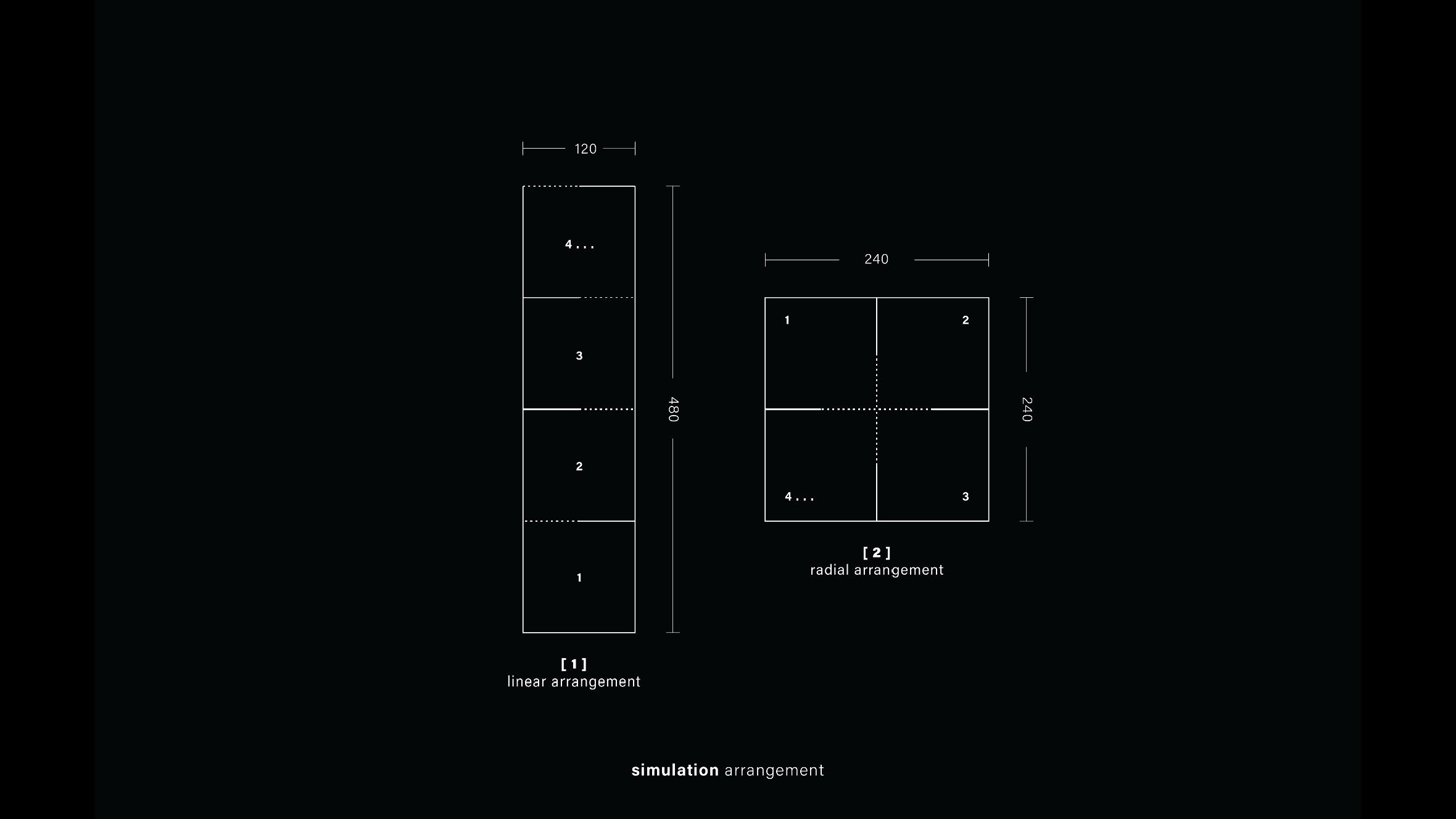
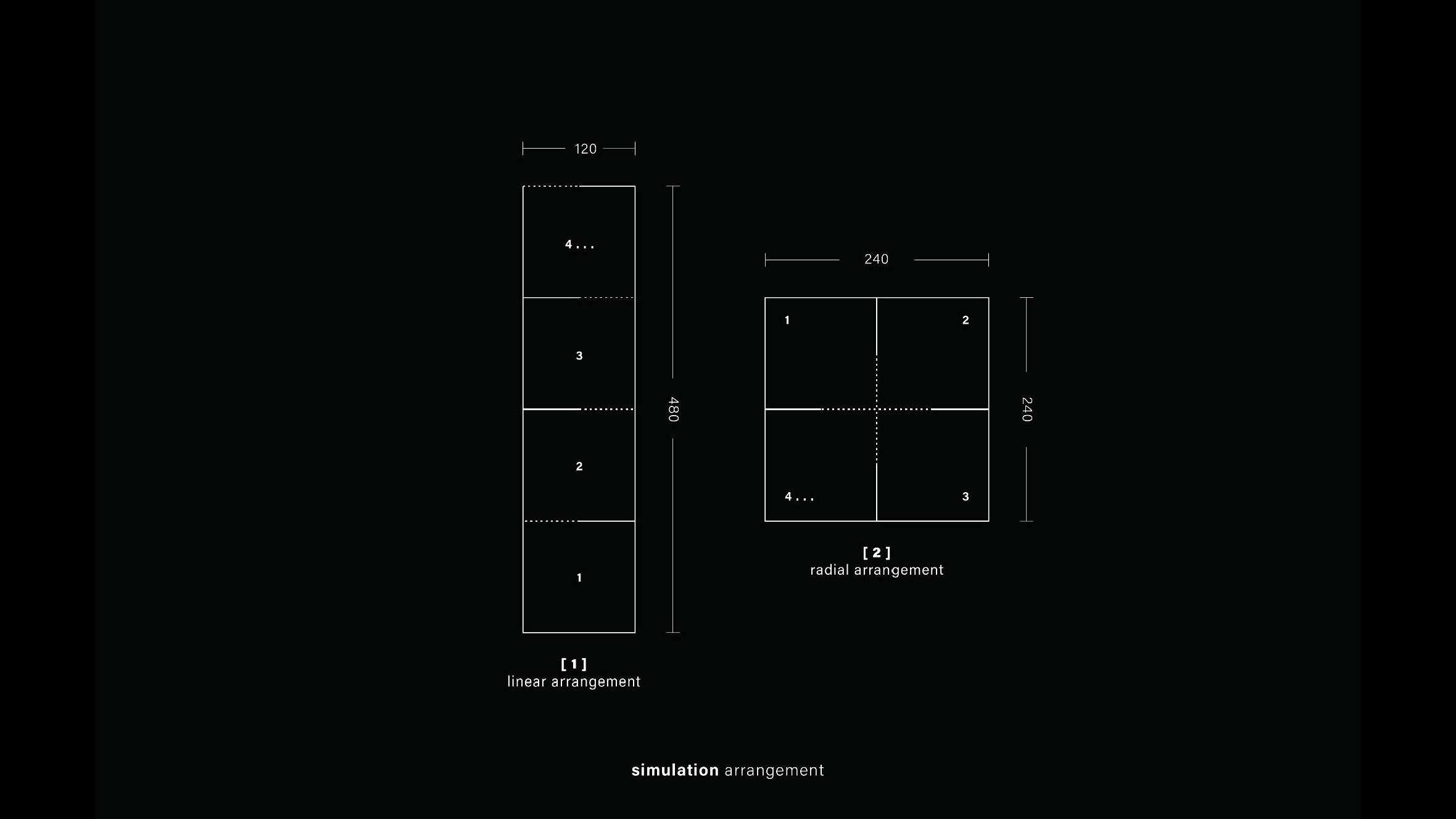
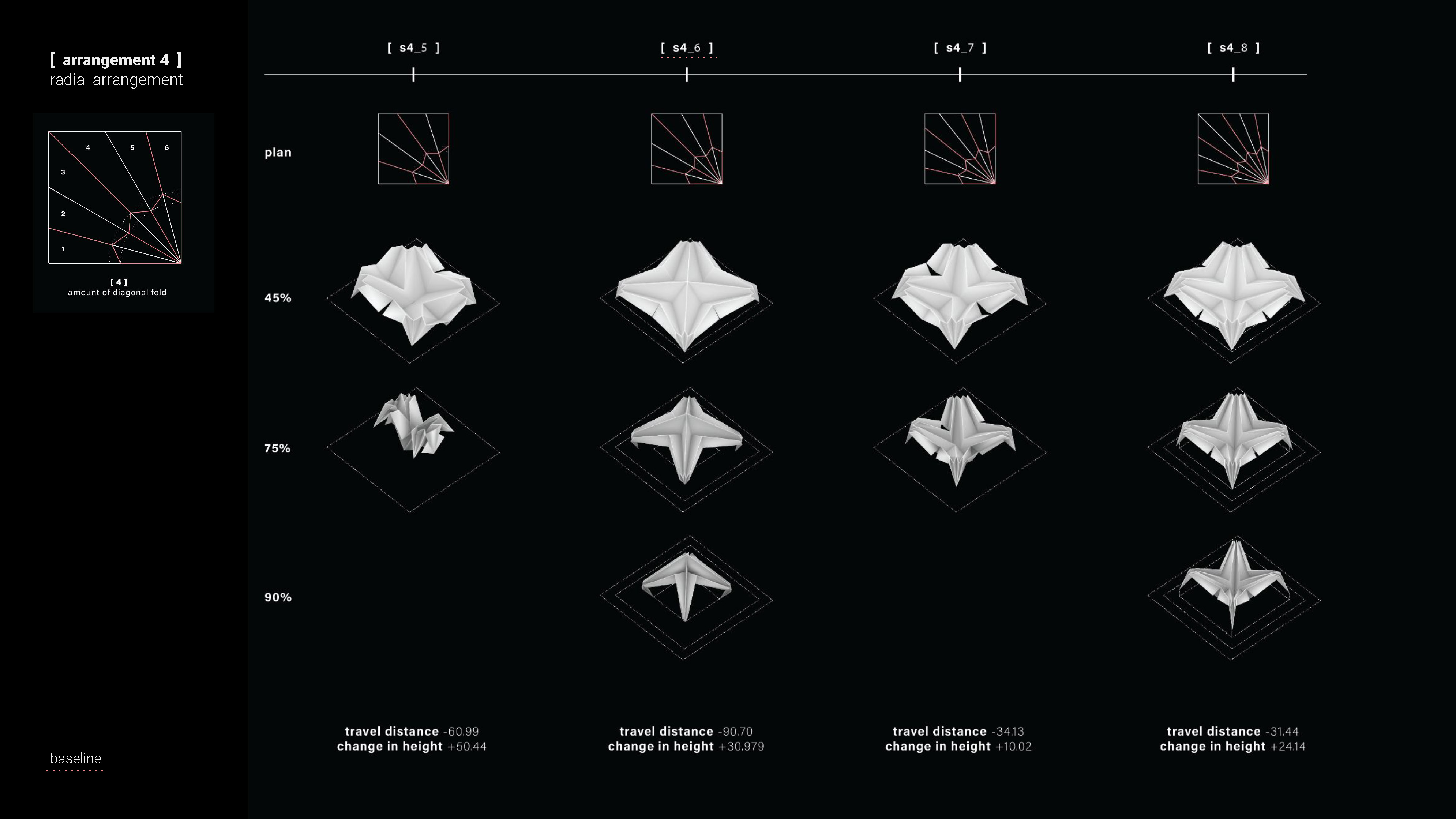
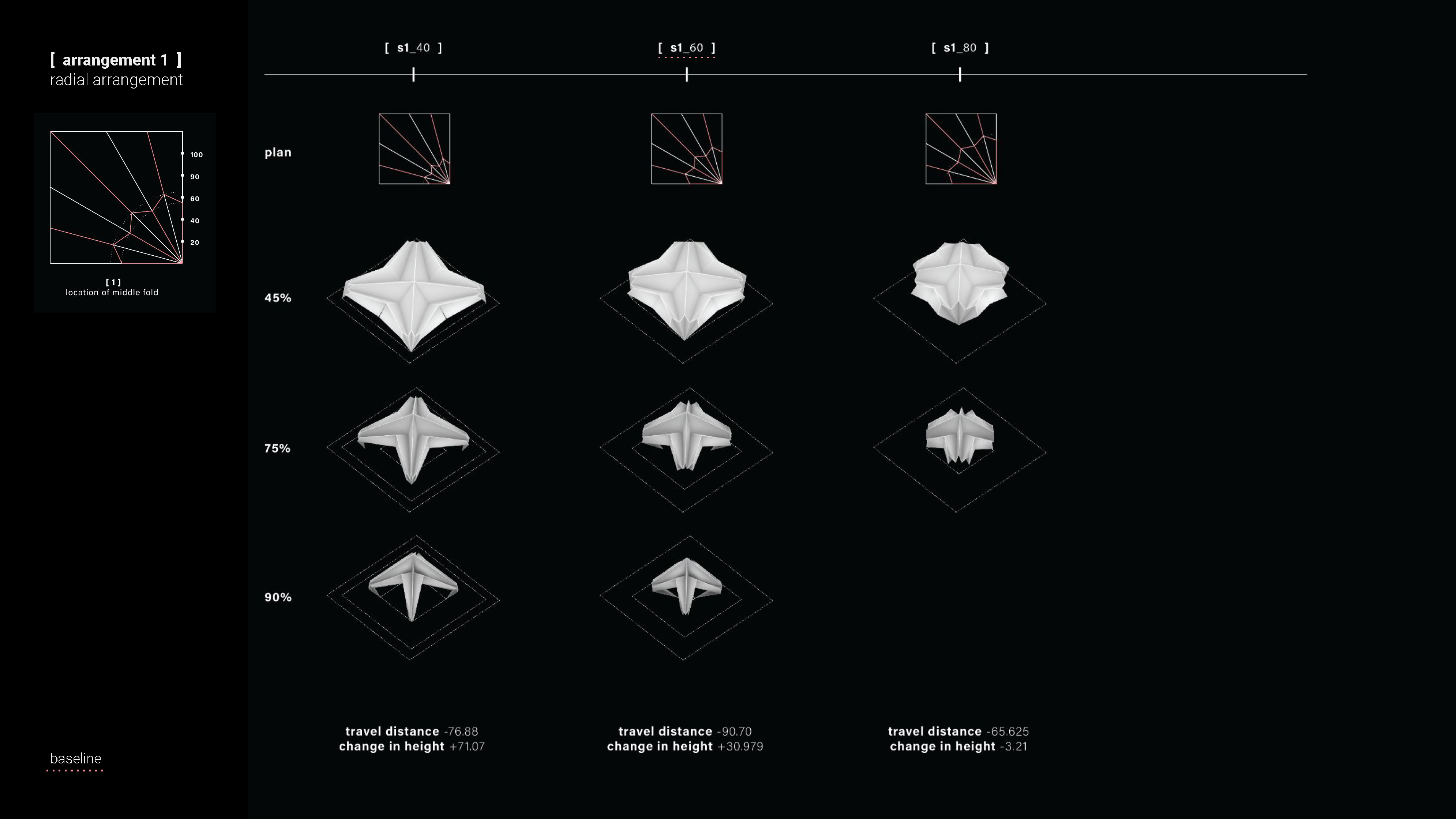
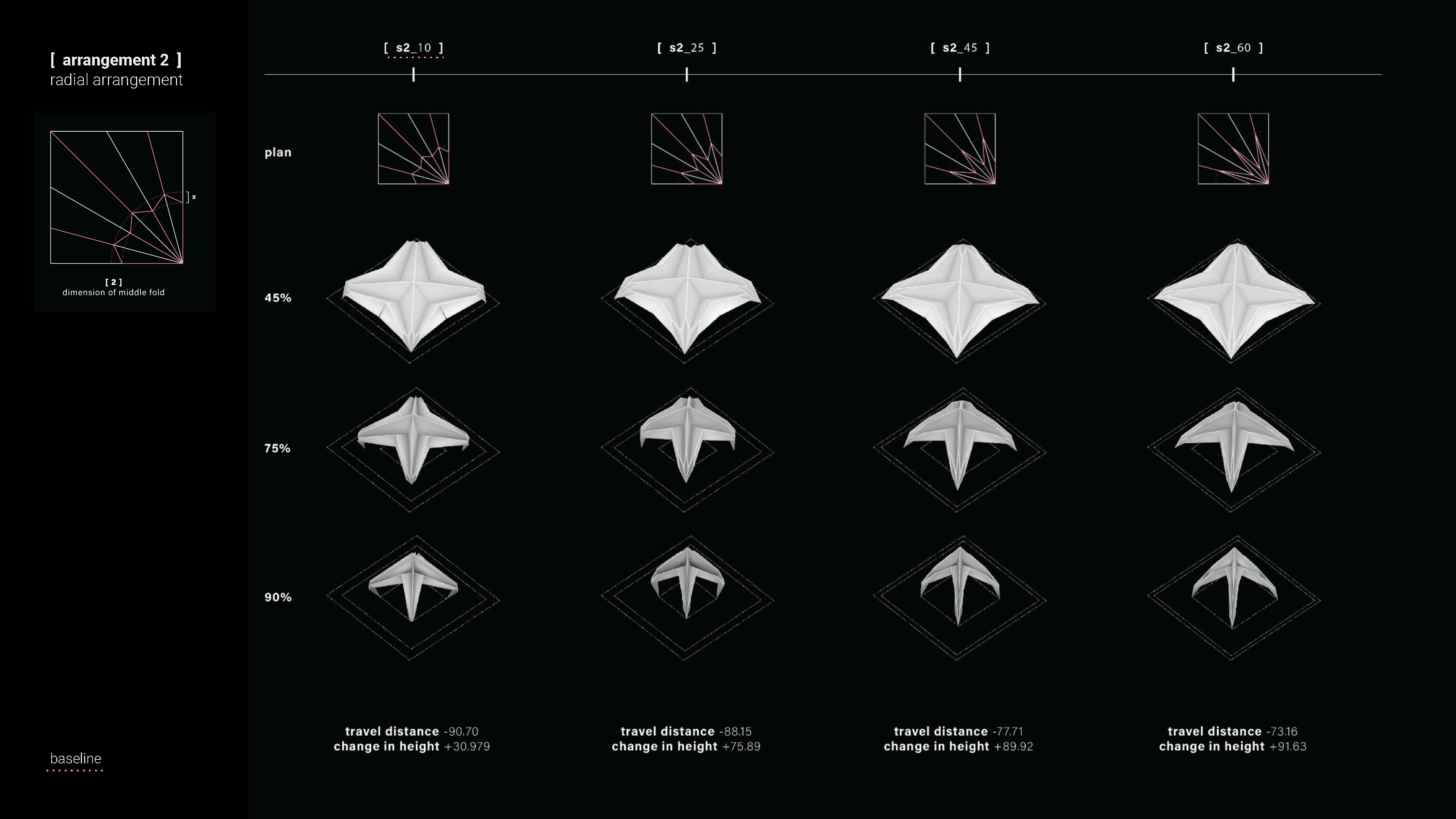
Simulation Geometry

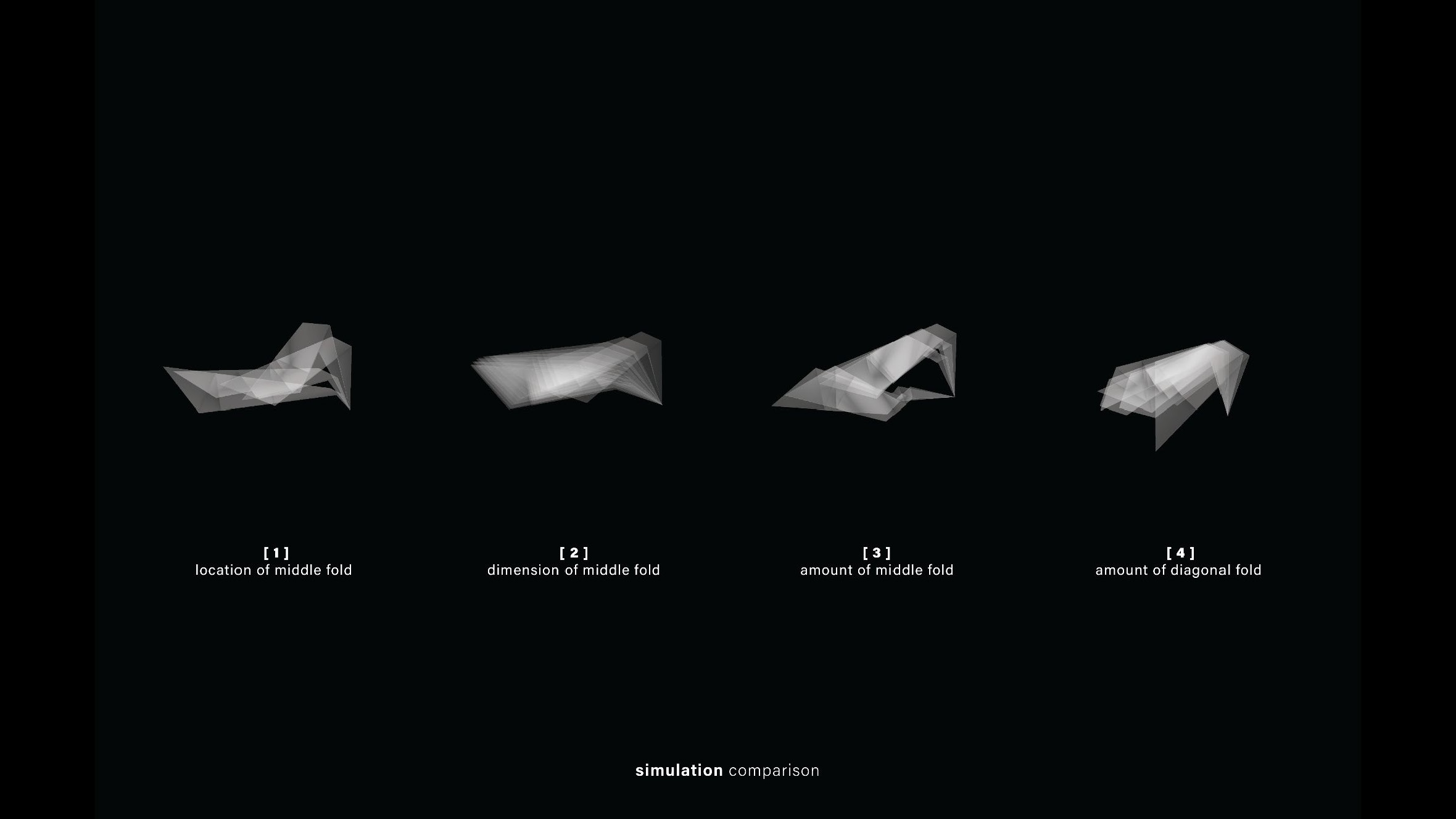

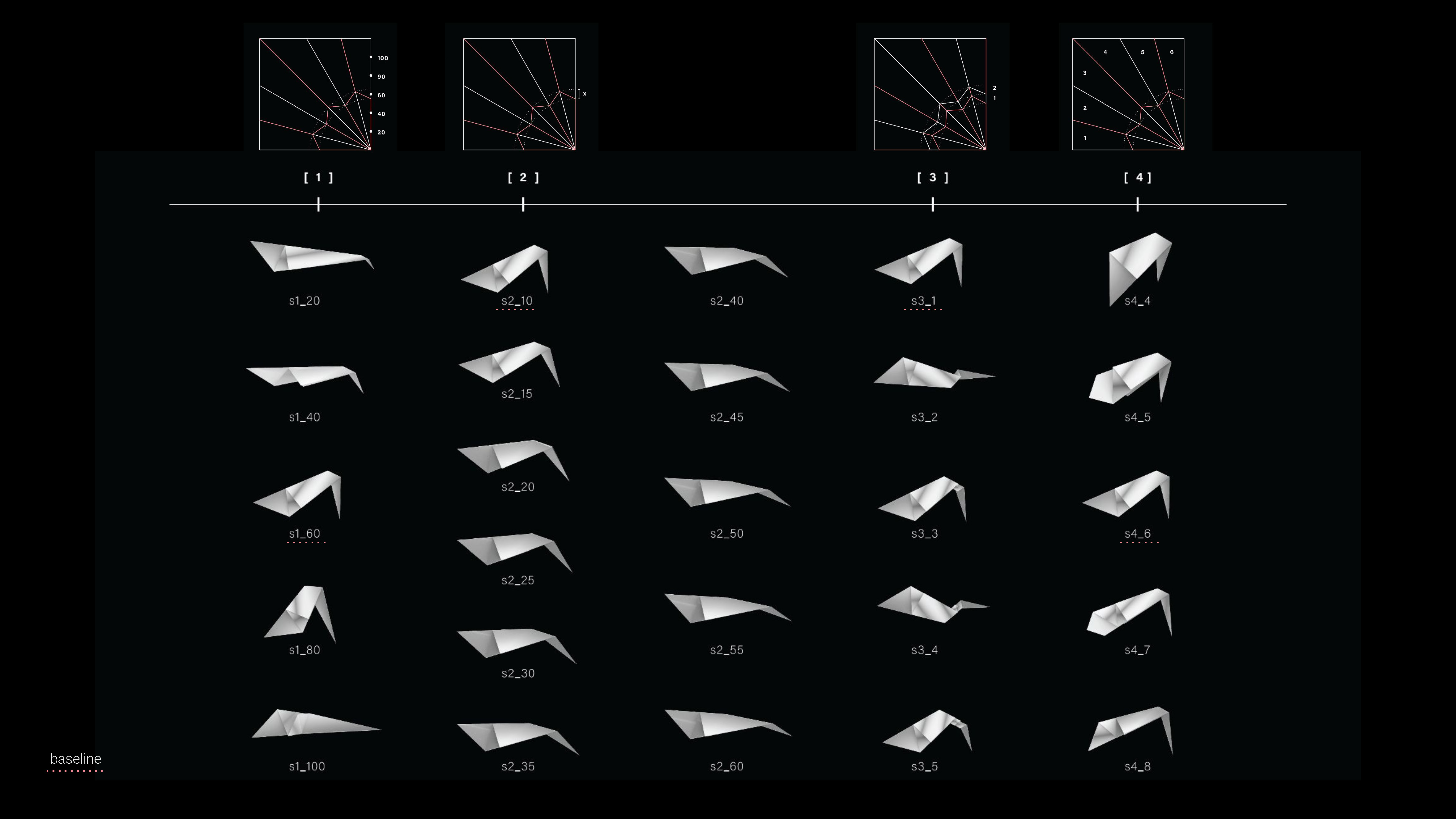

Simulation Arrangement